
Outil indispensable pour la prospection l’imagerie latérale ou Side-Imaging est un allié essentiel pour les pêcheurs désireux de découvrir de nouvelles zones de pêche. Cette fonction permet d’obtenir une vue latérale du fond, allant jusqu’à plusieurs dizaines de mètres de part et d’autre du bateau. Son nom varie selon la marque : Side Imaging chez Humminbird, SideScan chez Lowrance, ou encore SideVü chez Garmin. Dans tous les cas, le fonctionnement est identique, et nous allons détailler cela sans plus attendre.
Qu’est ce que l’imagerie latérale d’un sondeur de pêche ?
La fonction d’imagerie latérale, également nommée balayage latéral, est disponible chez la plupart des marques spécialisées en électronique marine.
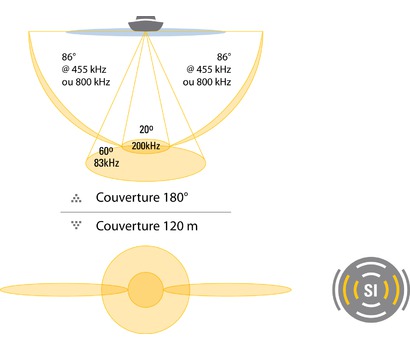
Elle permet d’obtenir une vue détaillée du fond marin de chaque côté du bateau. La largeur de cette vision est réglable dans les paramètres du sondeur et peut atteindre 120 mètres à gauche et à droite du bateau. Toutefois, cette portée dépend de la profondeur ainsi que des caractéristiques de la sonde utilisée et notamment la fréquence sélectionnée.

Contrairement aux sondeurs 2D classiques qui émettent des faisceaux verticaux, les sondes à balayage latéral utilisent des faisceaux horizontaux.
Cela offre une couverture plus large et permet d’identifier les structures immergées. Cette technologie est particulièrement utile pour explorer les fonds marins, rechercher des épaves ou détecter des bancs de poissons.
Quelles sont les fréquences de l’imagerie latérale ?
Vous le constaterez dans les réglages de votre appareil et selon le type de sonde sélectionné, plusieurs gammes de fréquences sont disponibles. Les fréquences utilisées pour l’imagerie latérale des sondeurs de pêche varient en fonction des modèles et des besoins des pêcheurs.
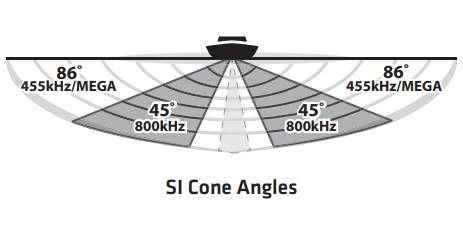
455 kHz : Cette fréquence standard permet une détection large et profonde. Elle est idéale pour rechercher de gros obstacles tels que des piles de pont ou des épaves.
800 kHz : Cette fréquence offre une image plus détaillée que le 455 kHz, mais au détriment de la portée du faisceau. Elle est généralement utilisée dans des profondeurs n’excédant pas 35 mètres.
1 MHz et plus (MEGA Imaging) : Cette technologie récente fournit la meilleure résolution possible. Cependant, la portée est considérablement limitée et ne sera pas efficace au-delà de 15 a 20 mètres de profondeur.

Interprétation de l’imagerie latérale
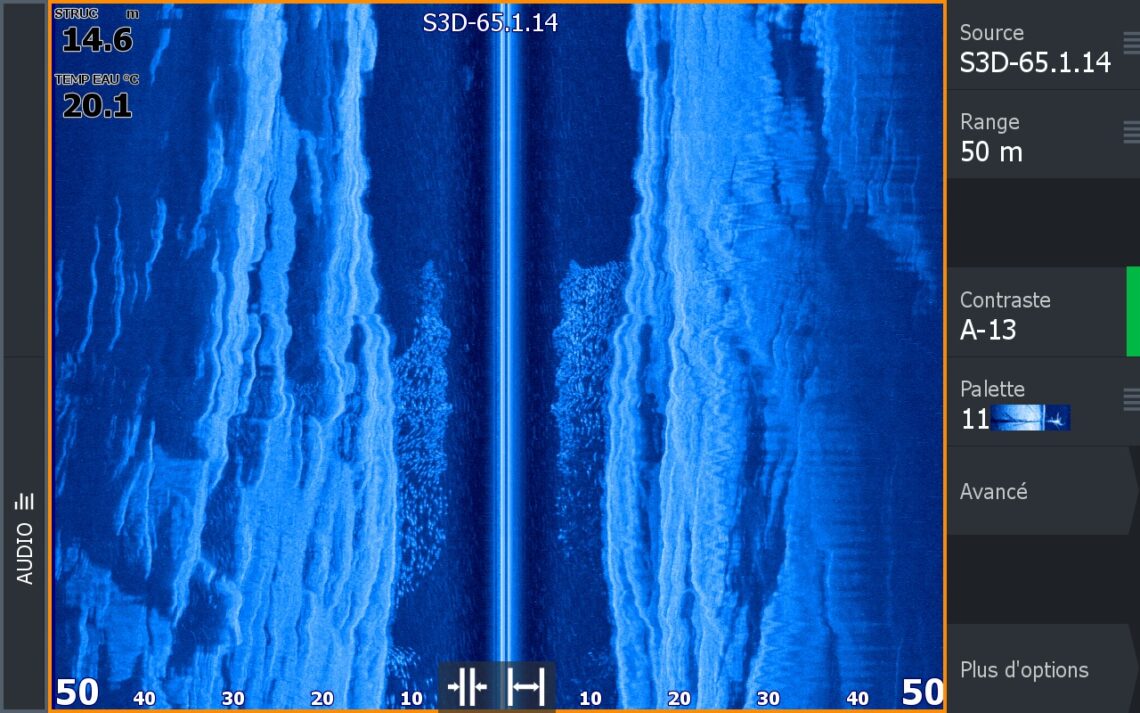
Le bateau se situe en haut au centre de l’image. Tout ce qui se situe en dessous représente le temps passé c’est à dire ce qui se trouve derrière le bateau lorsque vous naviguez

L’axe médian est la référence. Les zones qui s’étendent de l’axe médian aux bords de l’image représentent la colonne d’eau ( la profondeur indiquée sur l’image ci-dessus)
Pour faciliter la lecture de l’image initiale visible sur l’écran de votre sondeur, imaginez qu’on éclaire avec une lampe de chaque côté.

La visualisation des structures se fait grâce aux ombres portées. Leur taille permet de déduire celle des objets scannés. Plus l’ombre est grande, plus l’objet est volumineux.

Imaginez que la partie centrale de l’écran représente la colonne d’eau directement sous le bateau. C’est la zone où le sondeur envoie ses échos vers le bas pour mesurer la profondeur et détecter ce qui se trouve juste sous le bateau comme le ferai un sondeur 2d.

Gardez à l’esprit que tout ce que vous visualisez à l’écran est un historique du défilement.
Les parties horizontales à gauche et à droite de l’écran représentent ce qui se situe de part et d’autre du bateau. Ces zones sont balayées par l’imagerie latérale.
Les zones sombres, qui réfléchissent moins le signal, représentent des fonds meubles comme du sable ou de la vase. Cela en raison de l’absorption de l’onde sonar par le support.
À l’inverse, lorsque le retour est plus fort, matérialisé par un retour “brillant”, il s’agit d’une structure dure comme une épave ou un arbre qui réfléchit bien le signal du sondeur.
Les échos des poissons apparaissent sous la forme de points distincts ou de boules compactes. Cela dépend de la densité du banc et de la taille des poissons.
Conseil d’utilisation de l’imagerie latérale des sondeurs de pêche
Cette technologie est principalement utilisée pour la prospection et ne doit pas se substituer aux autres technologies, telles que l’imagerie 2D, mais plutôt les compléter.
Pour une utilisation optimale, le positionnement de la sonde est crucial. La sonde doit être placée aussi loin que possible des perturbations causées par le moteur. Son installation doit se faire de façon à être parallèle à la coque.

L’embase du moteur peut constituer un masque pour le faisceau. C’est pourquoi certains utilisateurs choisissent d’installer deux sondes, de part et d’autre du moteur, afin de garantir une couverture complète et une meilleure qualité d’imagerie. Trimez le moteur vers le haut aura pour effet de diminuer le masque produit par le moteur si vous utilisez une seule sonde tableau arrière.
Pour être efficace, le bateau doit être en déplacement et le plus stable possible. C’est pourquoi lorsque les conditions sont agitées, le rendu de l’image est moins net.
Pour limiter les perturbations, il est recommandé de scanner à une vitesse inférieure à 5 nœuds afin de stabiliser le bateau et de limiter les perturbations moteur.
Pour une détection optimale, réglez l’échelle latérale sur une valeur correspondant à trois fois la profondeur sous le bateau. Par exemple, sur une zone d’une quinzaine de mètres de profondeur, je règle sur 45 mètres. Je scannerai ainsi 90 mètres au total (45 mètres de chaque côté).


